





Ilmuwan kembangkan robot tuna dengan tendon yang dapat diprogram
Pada ikan sungguhan, otot-otot dapat dibuat kaku untuk berenang berkecepatan tinggi yang optimal, atau dilonggarkan untuk daya jelajah dan manuver.
Struktur fisik ikan semakin banyak ditiru dalam mendesain robot bawah air. Hal ini dikarenakan bahwa ikan adalah perenang yang mahir secara alami. Para ilmuwan, kini telah menemukan bahwa dengan menyesuaikan tingkat kekakuan ekor, robot tersebut dapat berenang dengan lebih efisien.
Pada ikan sungguhan, otot-otot dapat dibuat kaku untuk berenang dalam kecepatan tinggi dengan optimal, atau dilonggarkan memudahkan menjelajahi dan bermanuver kecepatan rendah yang lebih baik. Meski demikian, robot yang terinspirasi dari ikan memiliki hanya satu tingkat kekakuan sehingga tidak ideal dalam semua situasi.




“Memiliki satu ekor yang kaku seperti memiliki satu rasio gigi pada sepeda. Anda akan hanya efisien pada satu kecepatan. Ini seperti bersepeda melalui San Francisco dengan sepeda gigi tetap; Anda akan kelelahan setelah hanya beberapa blok”, kata Profesor Dan Quinn dari Universitas Virginia.
Sayangnya, sangat sulit untuk menentukan kapan dan apakah ikan benar-benar mengubah kekakuan ekornya. Bekerja dengan peneliti postdoctoral Qiang Zhong, Quinn beralih ke dinamika fluida dan biomekanik untuk mendapatkan model teoretis. Singkatnya, model menyatakan bahwa kekakuan ekor harus meningkat dengan kecepatan renang.
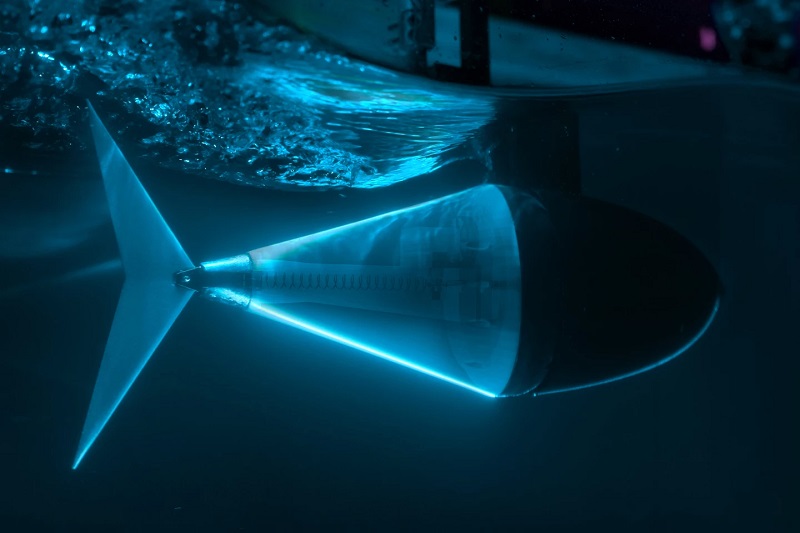
Dilansir dari New Atlas (12/8), untuk menguji teori mereka di dunia nyata para ilmuwan membuat sebuah robot tuna yang dikenal sebagai AutoTuna. Berdasarkan model kekakuan ekor, robot ini menggunakan tendon yang dapat diprogram untuk secara otomatis mengubah kekakuan ekornya saat berenang di saluran air berbasis laboratorium.
Hasilnya, ia dapat berenang pada rentang kecepatan yang lebih luas daripada robot dengan kekakuan ekor tetap yang identik. Hal yang tidak kalah menarik adalah energi yang digunakan hanya setengahnya dari robot sirip kaku. Sekarang para peneliti itu sedang menyelidiki bagaimana teknologi ini dapat diterapkan pada robot berdasarkan jenis hewan berenang lainnya.







