Robot ini bisa belajar berjalan berkat algoritma Google
Berhasil mengutak-ngutik algoritma yang ada, para peneliti dari Google Robotics mampu membuat robot berkaki empat untuk belajar bagaimana berjalan maju, mundur dan berbelok dengan sendirinya.
 Source: Google Robotics via Engadget
Source: Google Robotics via Engadget
Masih ada sejumlah tantangan yang harus diatasi agar dapat mencapai tahap di mana robot benar-benar bermanfaat, termasuk navigasi tanpa campur tangan manusia. Kita berada pada tahap di mana algoritma akan memungkinkan robot untuk belajar cara bergerak. Akan tetapi prosesnya berbelit-belit dan membutuhkan banyak input manusia, baik dalam mengambil robot ketika terjatuh, atau memindahkannya kembali ke ruang latihannya jika berkeliaran. Dilansir dari Engadget (3/3), penelitian baru dari Google dapat membuat proses pembelajaran robot jauh lebih mudah.
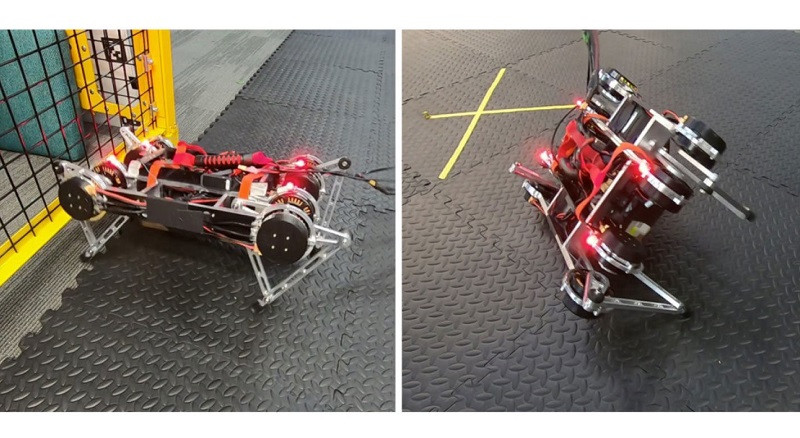
Sukses mengutak-atik algoritma yang ada, para peneliti dari Google Robotics mampu membuat robot berkaki empat untuk belajar bagaimana berjalan maju, mundur dan berbelok dengan sendirinya hanya dalam beberapa jam. Pertama-tama, mereka menyingkirkan pemodelan lingkungan. Biasanya, sebelum robot mendapat kesempatan untuk belajar berjalan, algoritma diuji dalam robot virtual di lingkungan virtual. Meskipun ini membantu mencegah kerusakan pada robot sebenarnya, meniru hal-hal seperti permukaan kerikil dan permukaan lunak sangat memakan waktu dan berbelit-belit.
Jadi para peneliti mulai berlatih di dunia nyata sejak awal, dan karena dunia nyata menyediakan variasi lingkungan alami, robot dapat lebih cepat beradaptasi dengan varian seperti tangga dan medan yang tidak rata. Namun, intervensi manusia masih diperlukan, di mana para peneliti harus menangani robot ratusan kali selama pelatihan. Jadi tim mulai memecahkan masalah ini, dan melakukannya dengan membatasi wilayah robot dan memintanya mempelajari beberapa manuver sekaligus. Jika robot berhasil sampai ke tepi wilayahnya sambil berjalan maju, ia akan mengenali posisinya dan mulai berjalan mundur, dengan demikian mempelajari keterampilan baru sambil mengurangi intervensi manusia.
Dengan sistem ini, robot dapat menggunakan pendekatan trial-and-error untuk akhirnya belajar secara mandiri melakukan navigasi sejumlah permukaan yang berbeda, pada akhirnya menghilangkan kebutuhan untuk keterlibatan manusia – tonggak penting dalam membuat robot lebih berguna. Namun, penelitian ini bukan tanpa batasan. Pengaturan saat ini menggunakan sistem overhead motion capture guna memungkinkan robot mengidentifikasi lokasinya – bukan sesuatu yang bisa direplikasi dalam aplikasi robot dunia nyata. Meskipun demikian, para peneliti berharap agar dapat mengadaptasi algoritma baru untuk berbagai jenis robot, atau bahkan beberapa robot dalam lingkungan belajar yang sama, sehingga menciptakan pengetahuan dan pemahaman yang akan membantu memajukan robotika di semua bidang.