






MIT kembangkan robot yang dapat memegang berbagai objek
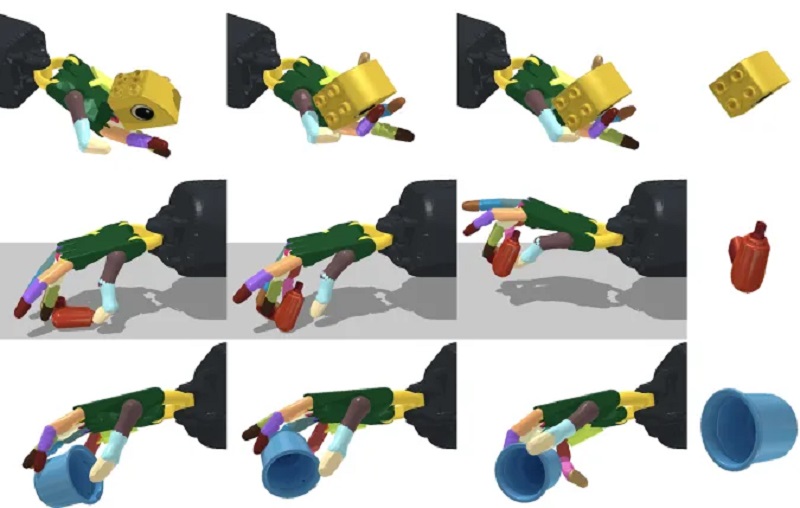
Dengan menggunakan algoritma AI tanpa model, mereka menciptakan simulasi tangan antropomorfik yang dapat memanipulasi lebih dari 2.000 objek.
Biasanya ketika tangan mengambil sebuah benda atau objek, maka kita tidak perlu memikirkan bagaimana cara tangan akan beradaptasi ketika memegang benda atau objek tersebut di tangan kita. Ini adalah proses yang terjadi secara alami dan terjadi dalam waktu yang singkat. Proses ini juga yang memungkinkan anak-anak untuk lebih cekatan dengan tangan mereka daripada robot tercanggih yang ada saat ini, untuk urusan memegang objek.
Meski demikian, hal tersebut bisa berubah dalam waktu dekat. Sebuah tim ilmuwan dari Laboratorium Ilmu Komputer dan Kecerdasan Buatan (CSAIL) MIT telah mengembangkan sistem yang membuat robot memiliki ketangkasan yang sama. Dengan menggunakan algoritma AI tanpa model, mereka menciptakan simulasi tangan antropomorfik yang dapat memanipulasi lebih dari 2.000 objek. Selain itu, sistem tersebut tidak perlu tahu apa yang akan diambil dan bagaiman memegangnya dengan sempurna.
Dilansir dari Gizmochina (8/11), untuk sementara sistem itu belum siap untuk digunakan di dunia nyata. Untuk memulai, tim perlu mentransfernya ke robot sungguhan. Ini mungkin bukan penghalang seperti yang kita kira. Pada awal tahun, ada para peneliti dari Universitas Zhejiang dan Universitas Edinburgh berhasil mentransfer pendekatan sistem AI ke anjing robot bernama Jueying. Sistem tersebut memungkinkan robot untuk belajar bagaimana berjalan dan berdiri dari jatuh.
Seperti yang diketahui, sistemnya saat ini belum sempurna. Namun sistem ini disebut sudah dapat menangani banyak objek yang lebih kecil, termasuk hal-hal seperti bola tenis dan apel dengan tingkat keberhasilan hampir 100%. Tetapi alat seperti obeng dan gunting belum bisa dilakukan dengan baik. Dalam hal objek seperti itu, tingkat keberhasilannya turun mendekati 30%. Namun, potensi sistem ini sangat besar. Suatu hari nanti bisa membuat robot lebih baik dalam memanipulasi alat dan membuatnya jauh lebih efisien dalam tugas-tugas seperti mengemas kotak.
- 10 Tahun Perjalanan Urban Republic, Ekspansi 61 Toko dan Bangun Komunitas Teknologi
- POCO Resmi Luncurkan Tablet Pad M1 dan Pad X1, Performa Ekstrem untuk Gaming dan Produktivitas
- Meta Luncurkan Oakley Meta Vanguard, Kacamata Pintar untuk Atlet dengan Fitur AI
- TECNO SPARK 40 Pro Series resmi meluncur, harga terjangkau fitur gak main-main








